Anleitung für den Camera Sync Tester
Inhalt
Einführung
Die Software Camera Sync Tester wurde entwickelt um den
Synchronisationsfehler von zwei oder mehr Kameras mit Hilfe des
Elektronenstrahls eines Röhrenmonitors als Referenzbewegung zu messen. Die
Kenntnis des Synchronisationsfehlers ist beispielsweise bei der Aufnahme von
stereoskopischen Fotos oder Videos mittels zweier Kameras.
Zur Messung des Synchronisationsfehlers wird üblicherweise eine exakt
definierte Bewegung aufgezeichnet, sodass aus den unterschiedlichen
Bewegungsphasen zweier Aufnahmen der Zeit-Offset abgeleitet werden kann. Echte
bewegte Objekte sind schwierig zu handhaben. Es ist wesentlich einfacher
stattdessen den Elektronenstrahl eines Röhrenbildschirms als Referenzbewegung zu
verwenden.
Wichtiger Hinweis: Dieser Aritkel wurde vor einigen Jahren
verfasst als Röhrenmonitore und CCDs mit Global Shutter gebräuchlich waren. Die
beschriebene Messmethode funktioniert nicht mit Flachbildschirmen und der
Rolling Shutter von Kameras mit CMOS-Sensoren beeinträchtigt unter Umständen
die Messung.
Kommandozeilenparameter
| -x |
Horizontale Bildschirmauflösung |
| -y |
Vertikale Bildschirmauflösung, begrenzt auf 768 Pixel |
| -f |
Bildwiederholrate |
Beispiel: Synctest.exe -x1024 -y768 -r100 startet
den Camera Sync Tester mit einer Auflösung von 1024 x 768 Pixel bei 100 Hz.
Verwendung des Camera Sync Testers
Zur Messung des Synchronisationsfehlers wird der Camera Sync Tester gestartet
und dessen Bildschirmausgaben mit beiden Kameras aufgenommen. Die
Belichtungszeit sollte dabei so kurz wie möglich gehalten werden. Bitte beachten
Sie, dass nur Röhrenmonitore für diesen Zweck geeignet sind, LCD-Bildschirme
nicht!
 |
| Vom Camera Sync Tester angezeigtes
Testmuster. Mit jedem Bildwiederholzyklus erhöht sich die Zahl der
vertikalen Streifen. |
Anschließend müssen die korrespondierenden Aufnahmen der linken und rechten
Kamera ausgewertet werden. Auf jeder Aufnahme lässt sich die Position des
Elektronenstrahls zum Zeitpunkt der Aufnahme erkennen. Normalerweise wird die
Position auf beiden Aufnahmen unterschiedlich ausfallen, außer die Kameras
hätten 100% synchron gearbeitet. Aus der Differenz der untersten sichtbaren
Zeilen folgt er Synchronisationsfehler. Je nach Belichtungszeit ist nicht nur
eine sondern sind mehrere Bildschirmzeilen sichtbar. Wir empfehlen immer die
Nummern der letzten sichtbaren Zeilen für die folgenden Berechnungen
heranzuziehen weil diese zuletzt gezeichnet wurden (die oberen Zeilen verblassen
langsam, sodass keine klar sichtbare Kante entsteht).
Für die folgenden Berechnungen wir die aktuelle Horizontal- (fHoriz)
und Vertikalfrequenz (fVert) des Monitors benötigt. Das
On-Screen-Menü des Monitors gibt diese Werte preis. Die Zeitdauer, welche der
Elektronenstrahl zum Zeichnen einer Zeile benötigt, ergibt sich zu:
tLine = 1 / fHoriz
Die Dauer für ein vollständiges Bild ergibt sich zu:
tFrame = 1 / fVert
Zur Berechnung des Synchronisationsfehlers tOffset, muss
tLine mit der Zeilennummerndifferenz der letzten sichtbaren
Zeilen z1 und z2 des linken und rechten
Bildes multipliziert werden:
tOffset = (z2 - z1) /
fHoriz
Falls linkes und rechtes Bild nicht dieselbe Anzahl an vertikalen Streifen (b1,
b2) zeigen, dann ist der Synchonisationsfehler größer als die
Dauer eines Bildwiederholzyklus. In diesem Fall müssen ein oder mehrerer
Bildwiederholzyklen (tFrame) zum vorherigen Ergebnis
hinzuaddiert werden.
tOffset = (z2 - z1) /
fHoriz + (b2 - b1) / fVert
Das Package des Camera Sync Tester enthält eine Excel-Tabelle, welche die
Auswertung mehrerer Messungen vereinfacht.
Beispiel
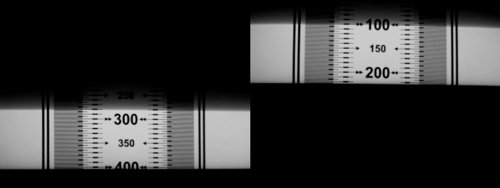
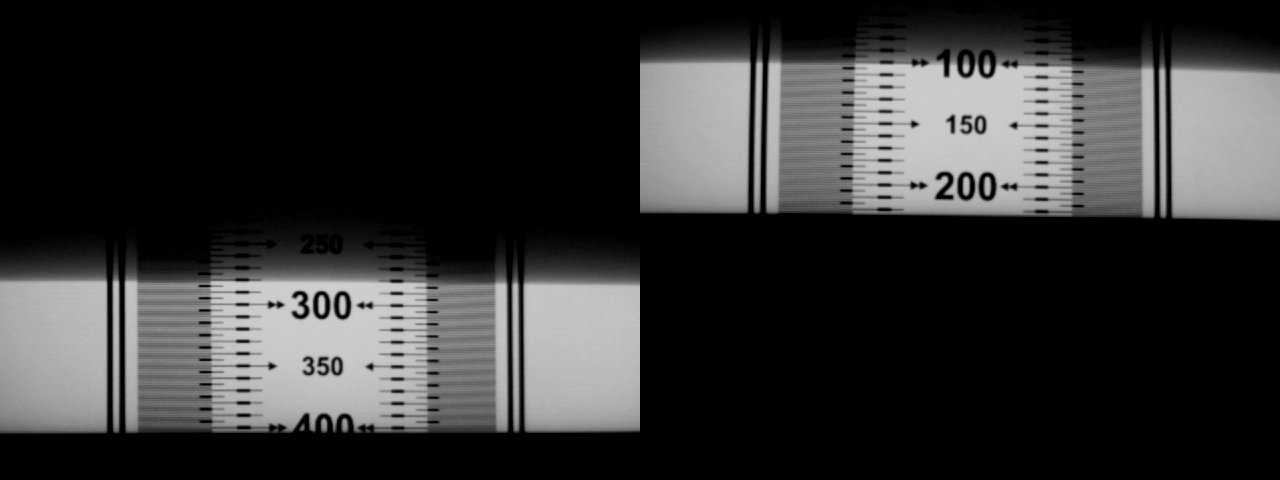
Werfen Sie einen Blick auf diese Aufnahmen. Wie sie sehen können wurde das
rechte Bild geringfügig später aufgenommen, da der Elektronenstrahl erst Zeile
z1 = 223 erreicht hat, während er im linken Bild bereits Zeile
z2 = 403 erreicht hat. Beide Bilder wurden während dem
gleichen Bildwiederholzyklus aufgenommen, da die Anzahl horizontaler Streifen
gleich ist (b1 = b2 = 2).
In unserem Fall wurde der Bildschirm im VGA-Modus mit 60 Hz betrieben,
während diese Bilder aufgenommen wurden (fHoriz = 31.5 kHz,
fVert = 60 Hz). Verwechseln Sie bitte nicht die Horizontal- und
Vertikalfrequenz. Die Horizontalfrequenz ist immer höher als die
Vertikalfrequenz, die üblicherweise im Bereich von 60 - 200 Hz liegt.
tOffset = (403 - 223) / 31500 Hz + (2 - 2) / 60 Hz = 5.7 ms
Wahl von Auflösung und Bildwiederholrate
Welche Bildschirmauflösung und Bildwiederholrate sollte für die Messungen
gewählt werden? Für Videokameras ist der Standardwert von 640 x 480 Pixel bei 60
Hz ausreichend. Eine höherer Auflösung macht keinen Sinn, da zusätzliche
Bildzeilen ohnehin nicht unterschieden werden könnten, ebenso eine höhere
Bildwiederholrate. Für hoch auflösende Fotokameras sind höhere Auflösungen
jedoch durchaus angebracht.
|